



مقدمه :
امروز میخواهیم در سایت ایران پاور شما را با کنترل اسکالر موتور القایی یا کنترل v/f موتور القایی به منظور کنترل سرعت موتور القایی با محاسبات نسبتاً ساده و در عین حال مفید و کاربردی که به یک کنترل سرعت خطی متغیر معقول منجر میشود آشنا کنیم.
گزارشات بسیاری از تحلیل های بازار نشان می دهد که موتورهای القایی در کاربردها و مشاغل مرتبط با موتورهای سنگین صنعتی محبوب ترین هستند. دلایل اصلی محبوبیت موتورهای القایی اساساً به دلیل استحکام بالای آن ، قابلیت اطمینان بیشتر از نظر سایش و پارگی و راندمان عملکردی نسبتاً زیاد است.
موتورهاي القایی بخصوص موتورهاي قفس سنجابی مزایایی نسبت به موتورهاي dc دارند. دارند. از مواردي نظیر نیاز به نگهداري کمتر ، قابلیت اطمینان بالاتر ، هزینه ، وزن ، حجم واینرسی کمتر ، راندمان بیشتر ، قابلیت عملکرد در وجود کموتا تور dc محیط هاي با گرد غبار و در محیط هاي قابل انفجار را می توان نام برد .
همچنین بخوانید » فیلتر اکتیو موازی چیست؟چطور با آن میتوان هزینه برق مصرفی را کم کرد؟
مشکل اصلی موتورهاي dc را وجود کموتاتور و جاروبک میتوان نام برد، که نگهداري زیاد و پر هزینه و نا مناسب بودن عملکرد موتور در محیط هاي با گرد و غبار بالا و قابل انفجار را به دنبال دارد. با توجه به مزایاي فوق در تمامی کار بردها، موتور هاي القایی بطور وسیع بر سایر موتورهاي الکتریکی ترجیح داده می شوند. با این حال تا چندي پیش از موتورهاي القایی فقط در کاربردهاي سرعت ترجیح داده میشدند و در کاربردهای سرعت متغیر موتورهای DC مورد استفاده قرار میگرفتند چرا که روش هاي مرسوم در کنترل سرعت موتورهاي القایی هم غیر اقتصادي و هم داراي راندمان کم بوده است.
همچنین بخوانید » درایو موتور های DC بخش سوم
اما امروزه با گسترش روز افزون سوئیچ های پر قدرت و نیمه هادی های فرکانس بالا به مراتب از نظر هزینه و راندمان استفاده از موتور های القایی به صرفه است.


موضوعات مهم در موتورهای القایی :
- پاسخ غیرخطی در اشباع هسته
- عدم ثبات در نوسانات موتور به دلیل تغییر درجه حرارت سیم پیچ.
با توجه به این جنبه های مهم اجرای کنترل موتور القایی بهینه نیاز به یک الگوریتم کاملاً محاسبه شده با قابلیت اطمینان بالا دارد ، به عنوان مثال با استفاده از یک روش “کنترل برداری” و علاوه بر این با استفاده از یک سیستم پردازشی مبتنی بر میکرو کنترلرها نیاز است.
همچنین بخوانید » ضریب توان چیست و چرا اصلاح ضریب توان انجام میدهیم؟بخش دوم
درک پیاده سازی کنترل اسکالر V/F :
به زبان ساده در روش کنترل اسکالر موتور القایی می توان با استفاده از فیدبک مستقیم از ولتاژ و جریان سیستم را کنترل کرده و موتور القایی AC را در وضعیت پایدار خود نگه داشت.
در روش کنترل اسکالر موتور القایی متغیر عددی مورد نظر ما میتواند به صورت مناسب با آزمایش های عملی و یا از طریق فرمول ها و محاسبات مناسب به دست آید.
همچنین بخوانید » شبیه سازی ماشین القایی سه فاز در قاب abc
در مرحله بعد ، این اندازه گیری می تواند برای اجرای کنترل موتور از طریق یک مدار حلقه باز یا از طریق توپولوژی فیدبک دار حلقه بسته استفاده شود.
نکته ی مهم دیگر در مورد این روش آن است که حتی اگر روش کنترلی نتایج مناسبی در حالت کاری پایدار موتور بدهد ممکن است در پاسخ های لحظه ای نتیجه تا حدی از نتایج مناسب به دور باشد.
چگونه موتورهای القایی کار می کنند :
کلمه “القایی” در موتورهای القایی به روش منحصر به فرد عملکرد آن اطلاق می شود که در آن تاثیر میدان مغناطیسی تولیدی توسط آهنربا و القای متقابل روتور و استاتور به یکدیگر سبب عملکرد موتور میشود.

هنگامی که ولتاژ AC به سیم پیچی استاتور اعمال میشود تغییر میدان مغناطیسی بر روی سیم پیچی استاتور به آرمیچر روتور اعمال شده و سبب ایجاد یک میدان مغناطیسی جدید بر روی روتور میشود که در آن عملکرد میدان مغناطیسی القایی استاتور سبب ایجاد گشتاور چرخشی بسیار بالایی میشود.این گشتاور چرخشی خروجی ، توان مکانیکی مؤثر مورد نیاز را به خروجی ماشین منتقل می کند.
همچنین بخوانید » ترانس جریان (CT) و ترانس ولتاژ (VT,PT) و تفاوت آن ها


درک نظریه کنترل سرعت اسکالر V/F :
در تمامی مفاهیم کنترل موتور القایی که در آن از تکنیک V / Hz استفاده شده است ، کنترل سرعت با تنظیم ولتاژ استاتور با توجه به فرکانس به گونه ای انجام می شود که شار شکاف هوایی موتور هرگز قادر به انحراف از محدوده مورد انتظار حالت پایدار نباشد ،به عبارت دیگر مقدار متغیرها در محدوده پیشبینی شده باقی میماند ، همچنین این روش کنترل اسکالر می نامند زیرا این تکنیک به شدت به دینامیک حالت پایدار برای کنترل سرعت موتور بستگی دارد.
همچنین بخوانید » جزوه سیم پیچی ترانسفورماتور و ماشین dc
می توانیم با استفاده از شکل زیر ، مفهوم کار موتور القایی را بیشتر درک کنیم ، که نشان از طرح ساده یک تکنیک کنترل اسکالر است. در مجموعه فرض شده است که مقاومت استاتور (RS) صفر است ، در حالی که اندوکتانس نشتی استاتور (LIs) تحت تأثیر اندوکتانس نشتی روتور و اندوکتانس مغناطیسی (LIr) قرار دارد. (LIr) که در واقع بزرگی شار فاصله هوایی را نشان میدهد ، دیده می شود که اندوکتانس نشتی کل مجموع این دو اندوکتانس یعنی (Ll = Lls + Llr)است.

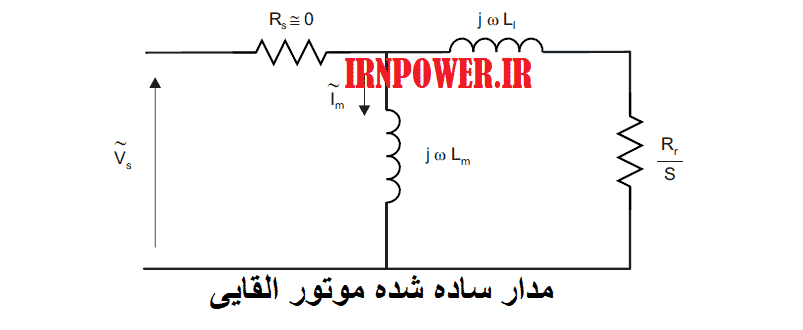
به همین دلیل ، شار فاصله هوایی ایجاد شده توسط جریان مغناطیس کنندگی مقدار تقریبی نزدیک به نسبت فرکانس استاتور می دهد. بنابراین عبارت phasor برای ارزیابی حالت پایدار می تواند به شرح زیر باشد:

برای موتورهای القایی که ممکن است در ناحیه مغناطیسی خطی خود در حال کار باشند ، Lm تغییر نخواهد کرد و ثابت می ماند ، در چنین مواردی ممکن است معادله فوق به صورت زیر بیان شود:

که در فرمول بالا V و Λ به ترتیب مقادیر ولتاژ استاتور و شار استاتور هستند ، در حالی که Ṽ پارامتر phasor را در طراحی نشان می دهد.
مرور بیان بالا :
آخرین بیان فوق به وضوح توضیح می دهد که تا زمانی که نسبت V / f بدون در نظر گرفتن هرگونه تغییر در فرکانس ورودی (f) ثابت نگه داشته شود ، در این صورت شار نیز ثابت می ماند ، که باعث می شود تا موتور گشتاور مورد نیاز بدون توجه به فرکانس ولتاژ منبع تغذیه عملکرد خود را ارائه دهد . این بدان معناست که اگر ΛM در یک سطح ثابت حفظ شود ، نسبت Vs / f نیز با یک سرعت مناسب ثابت ارائه می شود. بنابراین هرگاه سرعت موتور افزایش یابد ، ولتاژ در سیم پیچ استاتور نیز به طور متناسب افزایش می یابد ، به طوری که Vs / f میتواند ثابت نگه داشته شود.
هرچند که در اینجا لغزش به صورت تابعی از بار متصل به موتور است ، و سرعت فرکانسی سنکرون سرعت واقعی موتور را به تصویر نمی کشد.
در صورت عدم وجود گشتاور بار بر روی روتور ، ممکن است لغزش حاصل ناچیز باشد و به موتور اجازه می دهد تا به سرعت های سنکرون نزدیک شود.(این موضوع به تفصیل در درس ماشین های الکتریکی دو در لیسانس تدریس میشود)
به همین دلیل معمولاً یک پیکربندی ساده ی Vs / f یا یک V / Hz قادر به اجرای کنترل دقیق سرعت موتور القایی در هنگام اتصال موتور به گشتاور بار نیست. با این حال ، پلغزش بوجود آمده به دلیل بار میتواند به راحتی با اندازه گیری سرعت در سیستم جبران شود.
همچنین بخوانید » یکسوساز نیم موج
نمای گرافیکی نشان داده شده در زیر به وضوح یک سنسور سرعت را در یک سیستم V / Hz حلقه بسته نشان می دهد.

در پیاده سازی های عملی ، معمولاً نسبت ولتاژ استاتور و فرکانس ممکن است به مقدار این پارامترها بستگی داشته باشد.
تجزیه و تحلیل کنترل سرعت V / F :
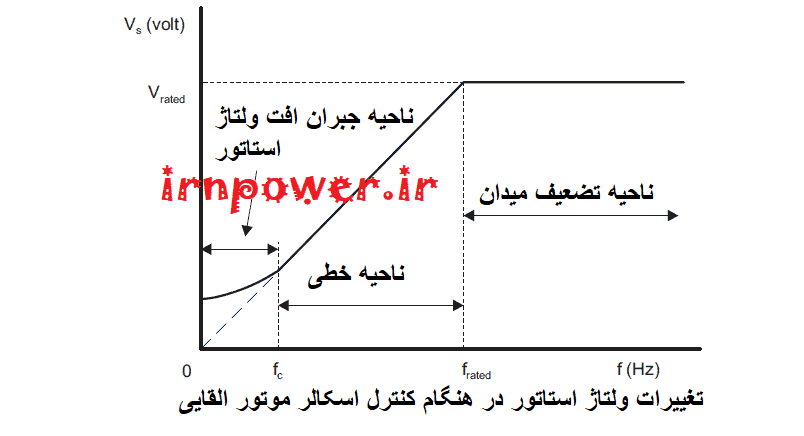
در شکل زیر می توان یک تحلیل استاندارد V / Hz را مشاهده کرد.

اصولاً 3 محدوده انتخاب سرعت در یک پروفایل V / Hz پیدا خواهید کرد که از نکات زیر میتواند برای شما قابل درک باشد:
- بر اساس دو تصویر قبلی ،هنگامی که در بازه ی فرکانسی 0 تا fc(فرکانس قطع) هستیم ولتاژ ورودی ضررویست که افت بالقوه ای را در سیم پیچ استاتور ایجاد می کند و این افت ولتاژ غیر قابل صرف نظر کردن بوده و نیاز است تا با افزایش ولتاژ منبع تغذیه Vs جبران شود.این موضوع نشان میدهد در این ناحیه نسبت V/F به صورت تابعی خطی نیست. ما میتوانیم فرکانس قطع fc برای ولتاژ های استاتور مناسب با استفاده از مدار معادلی که ذکر شد بسنجیم و بدست آوریم.
- در ناحیه دوم که ناحیه خطی است و فرکانس از فرکانس قطع تا فرکانس نامی است میتوانیم رابطه ی Vs/f ثابت را پیاده سازی کنیم.در این حالت شیب این رابطه میزان شار فاصله هوایی را مشخص میکند.
- در ناحیه ی بالاتر از فرکانس نامی ،ثابت نگه داشتن مقدار Vs/f امری غیر ممکن میشود چرا که در این ناحیه ولتاژ استاتور تمایل دارد در مقدار فرکانس نامی محدود شود.این اتفاق می افتد تا مطمئن شویم كه سیم پیچ استاتور در معرض خرابی عایق قرار نمی گیرد.با توجه به این وضعیت ، شار شکاف هوایی ناشی از آن کاهش می یابد ، و منجر به کاهش گشتاور روتور میشود. معمولا از قاعده ی V/F ثابت در این محدوده استفاده نمیشود.
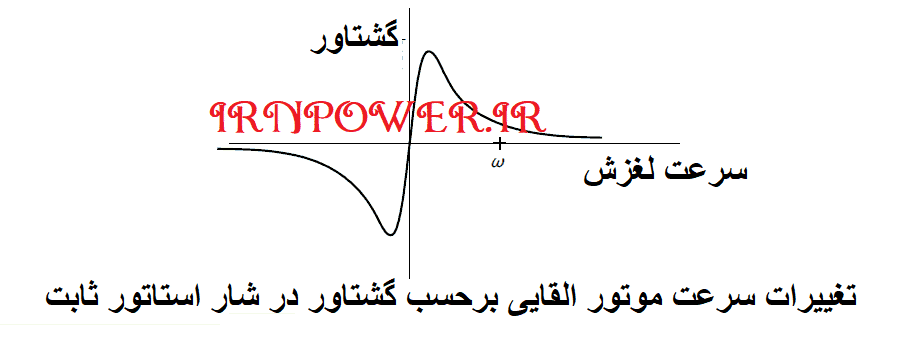
با توجه به وجود شار مغناطیسی ثابت استاتور، بدون در نظر گرفتن تغییر فرکانس در سیم پیچ استاتور ، گشتاور روی روتور فقط به سرعت لغزش وابسته میشود، این اثر را می توان در شکل آخر ارائه شده در بالا مشاهده كرد.
حلقه باز یا حلقه بسته :
با تنظیم مناسب سرعت لغزش ، سرعت موتور القایی را می توان با استفاده از اصل V / Hz ثابت ، به همراه گشتاور بار روی روتور کنترل کرد.بنابراین چه این یک کنترل باز یا حلقه بسته باشد ، هر دو با استفاده از قانون V / Fثابت قابل اجرا هستند.
یک حالت کنترل حلقه باز می تواند در برنامه های کاربردی زیادی استفاده شود که در آن دقت کنترل سرعت ممکن است عامل مهمی نباشد ، مانند واحدهای HVAC یا فن و هواکش ها و دمنده ها.در چنین مواردی با مراجعه به میزان سرعت موردنیاز موتور ، فرکانس بار تعیین میشود و پیش بینی می شود سرعت روتور تقریباً همزمان سرعت سنکرون را دنبال کند.هر نوع اختلاف در سرعت ناشی از لغزش موتور به طور کلی در چنین کاربردهایی نادیده گرفته می شود.