
در پست قبل در مورد علت نیازمند بودن به مدار درایور برای موتور و استفاده از روش مداری درایو موتور با کمک ترانزیستور های قدرت را به طور مفصل توضیح دادیم.برای مشاهده ی این پست میتوانید بر روی اینجا کلیک کنید.
امروز میخواهیم در سایت ایران پاور شما را با دو روش دیگر در درایو موتورهای دی سی آشنا کنیم.
2.استفاده از L293Dو L298 :
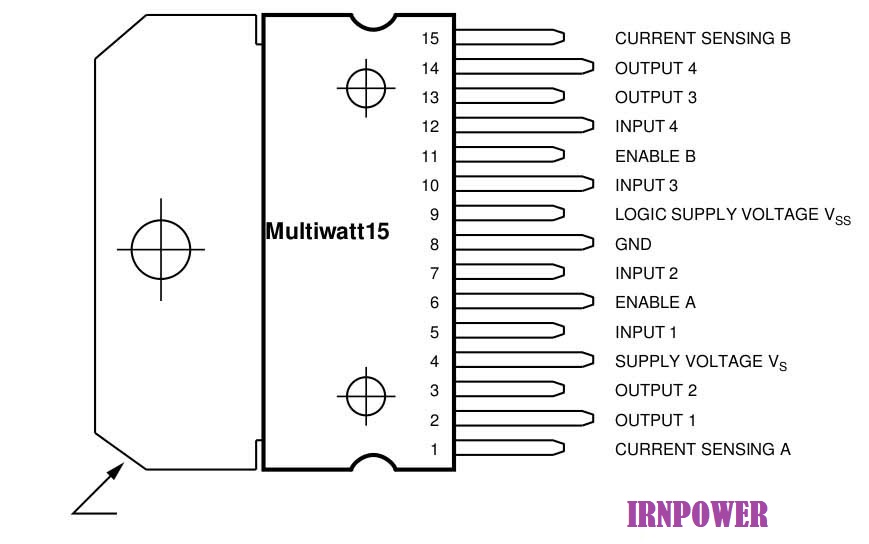
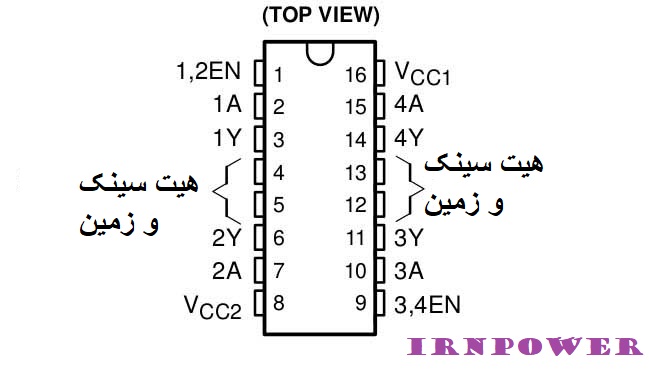
L293Dو L298 آیسی های دارای مدار تمام پل برای درایو موتور هستند.با استفاده از این آیسی ها میتوان دو موتور را در جهت ساعتگرد و یا پادساعتگرد به حرکت درآورده و کنترل کرد.پین های خروجی این دو آیسی در تصاویر زیر قابل مشاهده هستند.
تفاوت های اساسی میان L293D و L298 :
| مشخصات | L298 | L293D |
| حداکثر جریان پیوسته برای هر کانال خروجی | 2A | 0.6A |
| پیک جریان لحظه ای برای هر کانال(کمتر از 100 میکروثانیه) | 3A | 1A |
| دیودهای حفاظتی در سراسر موتور | نیازمند محافظ خارجی | درون آیسی وجود دارد |
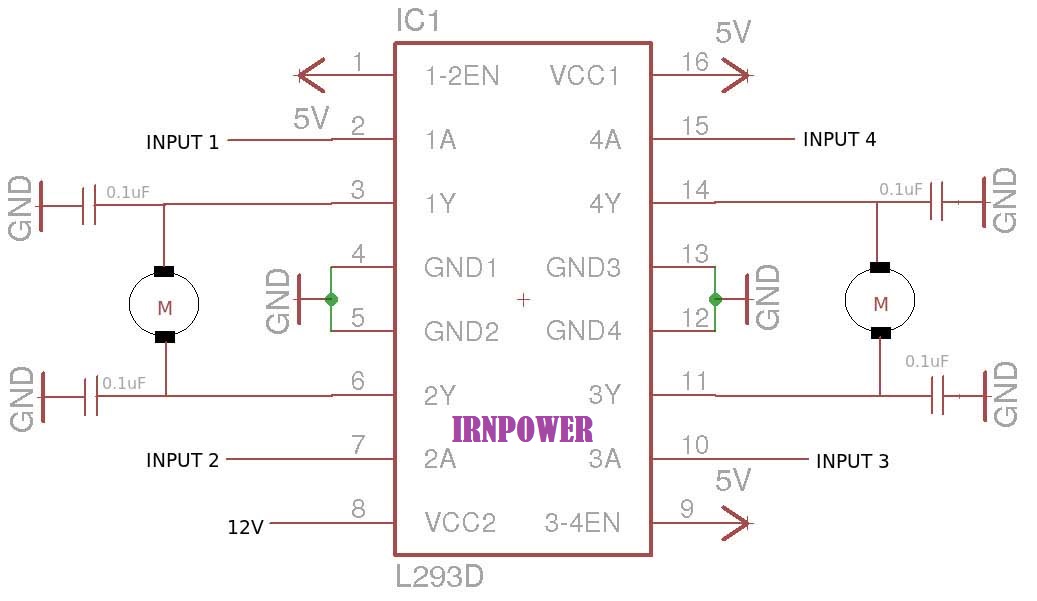
در اینجا ما آیسی L293D را که دارای 600میلی آمپر توانایی است را انتخاب میکنیم که برای موتور های DC کوچک مناسب و درون خود آیسی حفاظت ذکر شده نیز وجود دارد.
توضیح پایه های آیسی :
Enable pins : پین های شماره 1 و شماره 9 از این دسته هستند.پین شماره 1 برای فعال سازی درایور تمام پل سمت چپ (1و2) و پین شماره 9 برای فعال سازی درایور تمام پل 3و4 استفاده میشوند.مفهوم اساسی ساده است ،با استفاده از این پین شما میتوانید برروی سرعت موتور کنترل داشته باشید.(با کمک تکنیک PWM)
VCC1 (Pin 16) :پین تغذیه آیسی که باید به 5 ولت وصل شود.
VCC2 (Pin 8) : پین تغذیه برای موتور .اگر میخواهید موتور 12 ولتی را درایو کنید ،12 ولت باید به این پایه اعمال کنید.
GND (Pins 4,5,12,13) : این پین ها را به GND مشترک مدار متصل کنید.
Inputs (Pins 2,7,10,15): این پین ها پین های ورودی هستند شامل سیگنال های کنترلی که از میکروکنترلرها و یا دیگر مدارات داده میشوند .برای مثال اگر بر روی پین 2(ورودی اولین نیم پل) بخواهیم در وضعیت یک باشیم(5ولت اعمال کنیم.) آنگاه ما بر روی پین VCC2 ولتاژی متناسب با ورودی اولین نیم پل خواهیم داشت.همچنین برای وضعیت صفر(0ولت اعمال شود به پین 2) ،0ولت بر روی پین 3 ظاهر میشود.
Outputs ( Pin 3,6,11,14) :پین های خروجی.متناسب با سیگنال های ورودی سیگنال های خروجی بدست می آیند.
| 1A | 2A | 1Y | 2Y | موتور1 |
| وضعیت0 | وضعیت 0 | 0 | 0 | توقف |
| وضعیت1 | وضعیت0 | 12V | 0 | ساعتگرد |
| وضعیت0 | وضعیت1 | 0 | 12V | پادساعتگرد |
| وضعیت1 | وضعیت1 | 12V | 12V | ترمزی |
برای درایو موتورهای توان بالا رله ها معمولا استفاده میشوند که در بخش بعدی توضیح داده خواهند شد.


{kind=link}
بدون دیدگاه