
مقدمه :
در پست های قبلی در مورد درایو موتور های DC به طور مفصل در سایت ایران پاور صحبت شد.در صورت تمایل به مطالعه درایو موتورهای dc اینجا کلیک کنید.امروز میخواهیم در سایت ایران پاور شما را با روش کنترل گشتاور مستقیم در موتور های القایی آشنا کنیم.
آشنایی کلی با روش های کنترل موتور القایی :
موتورهای القایی امروزه بطور گسترده ای در برنامه های کاربردی صنعتی، تجاری و خانگی استفاده می شود. استفاده از موتورهای چند فازه(سه فاز و بالاتر) روز به روز در حال افزایش است. از روش های کنترلی معروف موتورهای القایی می توان به روش کنترل برداری و کنترل اسکالر اشاره کرد. از معایب کنترل اسکالر در موتور این است که در کنترل اسکار نمی توان حالت گذرای موتور را کنترل کرد. در مقابل کنترل برداری نه تنها حالت ماندگار موتور بلکه حالت گذرا موتور را نیز کنترل می کند.
روش های مختلفی برای پیاده سازی کنترل برداری موتورالقایی وجود دارد که محبوب ترین آن ها عبارتند از DTC و FOC و امروز به منظور توضیح DTC در سایت ایران پاور با شما همراه خواهیم بود.قبل از توضیح روش کنترل گشتاور مستقیم ابتدا شما را به صورت مختصر با ماشین های القایی آشنا میکنیم.
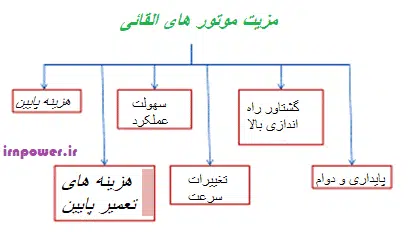
ماشین های القایی؟مزایا و تاریخچه ؟
ماشین های القایی بیش از صد سال قبل به دلیل مزایایی نظیر عدم پیچیدگی ساختاری، قدرت بالا، قابلیت اطمینان مناسب، قیمت، حجم و وزن کم و راندمان بالاتر مورد توجه قرار گرفته اند.در مقایسه با موتور DC یا سنکرون؛ قیمت کمتر، روان و بی صدا کار کردن، عمر طولانی، نیاز کم به تعمیر و نگهداری، رنج توان بالاتر و راندمان بهتر می باشد.
در موتورDC ، شار توسط جریان تحریک If قابل کنترل است و گشتاور نیز مستقل از شار توسط جریان Ia قابل کنترل است. اما در موتورهای القایی، میدان های استاتور و روتور مستقل از یکدیگر نبوده و بر یکدیگر اثر دارند( که این میدان ها در تولید گشتاور نقش دارند).
کنترل گشتاور مستقیم (DTC) :
مزیت کنترل گشتاور مستقیم کم کردن محدودیت ها و پیچیدگی های موجود در روش کنترل برداری است.در این روش اگرچه ریپل گشتاور وجود دارد اما سادگی و سهولت در اجرای این روش علت اصلی محبوبیت آن است.
در این روش هدف اصلی کنترل شار و گشتاور موتور القایی به صورت مستقل از یکدیگر(همانند موتور دی سی) به كمک يک جدول و با انتخاب بهینه ي سوئیچینگ است.اگرچه در این روش ریپل گشتاور وجود دارد اما انتخاب حالت بهینه سوئیچینگاينورتر باعث محدود كردن خطاهاي مرتبط با شار و گشتاورالكترومغناطیسی در حدود باند هیسترزيس شار و گشتاورمیشود.
ویژگی های مهم DTC :
- با تغییر رفرنس ، شار و گشتاور به سرعت تغییر میکنند.
- پاسخ پله در آن overshoot ندارد.
- راندمان بالا و تلفات پایین.(سوئیچ ها صرفا زمانی سوئیچ میشوند که گشتاور و شار از بازه ی هیسترزیس خود خارج شوند.)
- به یک مدولاتور جداگانه در آن نیاز نداریم.(به صورت مستقیم و بدون نیاز به PWM با استفاده از پهنای باند هیسترزیس وضعیت سوئیچ ها مشخص میشوند.)
- کنترلر جریان PI در آن نیاز نیست.بنابراین تنظیم ضرایب آن نیز در این روش وجود ندارد.
- تجهیزات اندازه گیری جریان باید بسیار باکیفیت باشند.زیرا هر اسپایک در سیگنال های اندازه گیری شده میتواند منجر به اشتباه در عملکرد کنترل شود.
- در سرعت های بالاتر این روش به هیچ یک از پارامترهای موتور حساس نیست.اگرچه در سرعت های پایین تر،خطا در مقاومت استاتور میتواند بسیار حساس باشد در بخش تخمین گر شار استاتور.
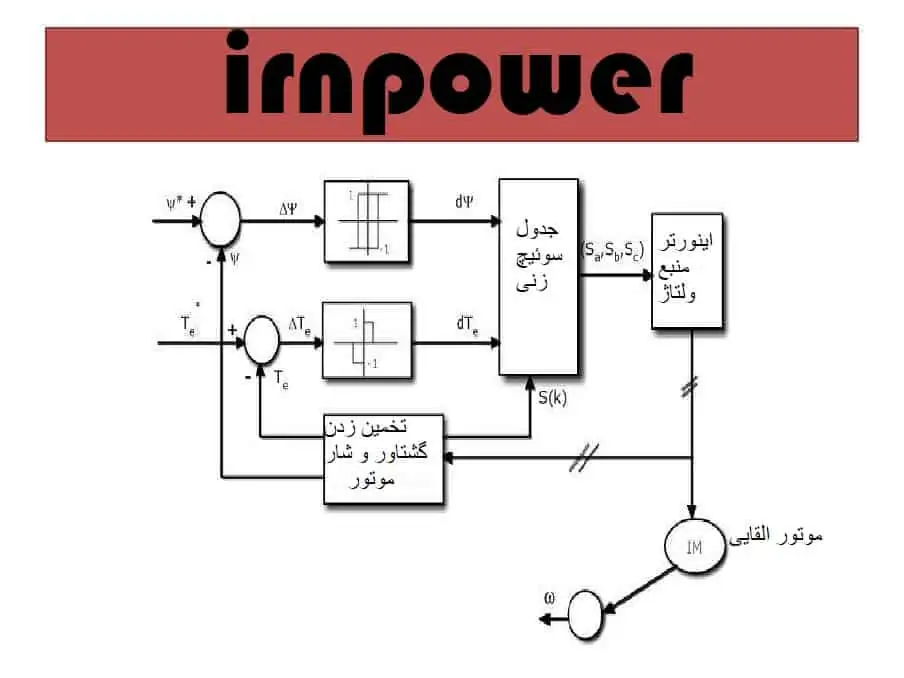
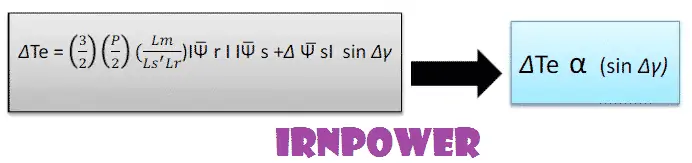
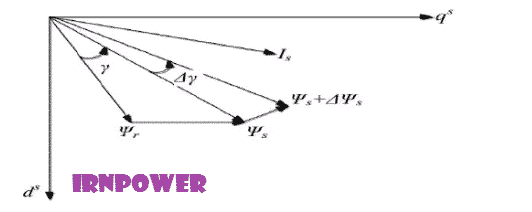
به جدول زیر توجه کنید. شار استاتور در طول بردارهای ولتاژ اعمالی تغییر میکند و رابطه ی آن به شکل زیر است :
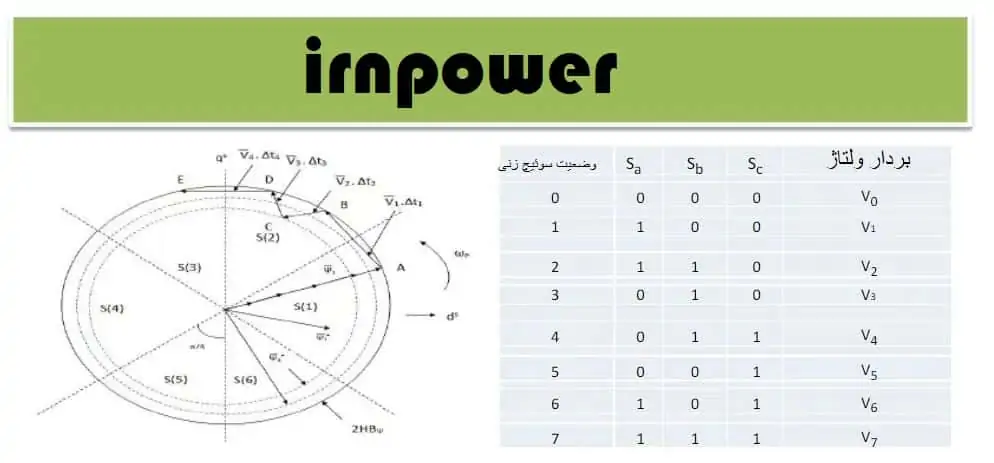
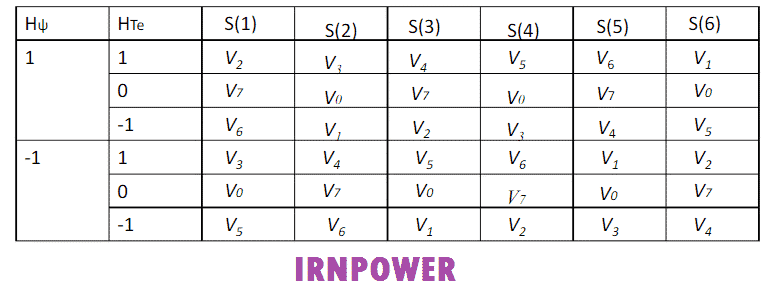
کنترل کننده ی هیسترزیس موجود در روش گشتاور مستقیم وضعیت خطای گشتاور و شار را تولید می کند. بر اساس این وضعیت های خطا و بردار زاویه شار استاتور، بردار ولتاژ کنترلی مورنیاز بر اساس جدول کلیدزنی که در شکل زیر نشان داده شده است، جهت حفظ خطای گشتاور و شار استاتور داخل باند هیسترزیس انتخاب می شود.


){kind=link}
بدون دیدگاه