
مقدمه :
چرا به مدار درایور برای یک موتور نیازمندیم ؟
موتورهای DC دارای جعبه دنده به طور کلی جریانی بزرگتر از 250 میلی آمپر نیاز دارند.آیسی هایی مانند تایمر 555 ، میکروکنترلر ATMEGA16 ، آی سی های سری 74 توانایی تغذیه ی این حجم از جریان را دارا نمیباشند.اگر ما موتورها را به صورت مستقیم به خروجی هر یک از آی سی های بالا متصل کنیم با احتمال بالا این آی سی ها صدمه خواهند دید.
بنابراین نیازمند مداری هستیم که مانند پلی بین آی سی های بالا و موتورها عمل کنند.برای انجام این کار چندین روش وجود دارند که ما سه روش زیر را بررسی میکنیم :
*1.با استفاده از ترانزیستور
*2.با استفاده از L293D/L298
*3.با استفاده از رله ها
با استفاده از ترانزیستور :
کنترل در یک جهت :
اگر شما میخواهید تا موتور خود را صرفا در یک جهت بچرخانید ،بنابراین ساده ترین مدار را میتوانید برای این کاربرد بسازید.در این مدار ترانزیستور قدرت استفاده شده تا یک موتور را روشن و یا خاموش کند که به مقدار ولتاژ اعمال شده به بیس ترانزیستور وابسته است.از این مدار به صورت عملی برای استفاده از ربات تعقیب خط ساده میتوان استفاده کرد .
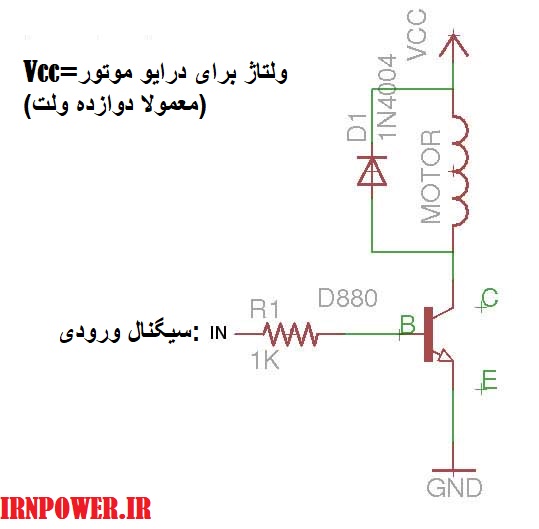
نحوه ی عملکرد مدار :
نکته مهم :
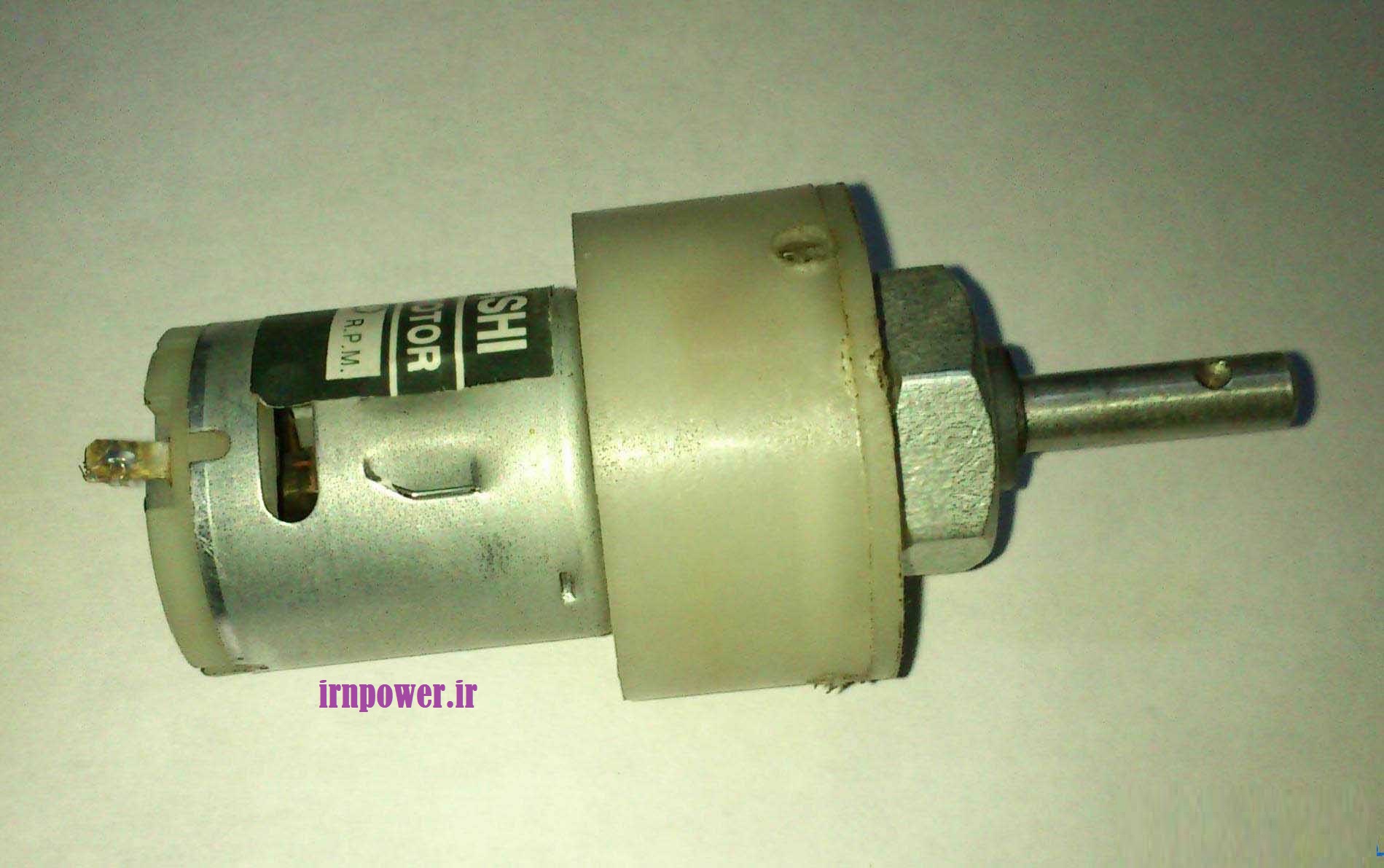
*میزان رنج توانی ترانزیستوری که استفاده میکنید را بررسی کنید.این ترانزیستور باید دارای حداکثر جریانی بیشتر از جریانی باشد که موتور میکشد.یک موتور DC معمولی که در شکل زیر نشان داده شده است ، 250 میلی آمپر جریان میکشد.ترانزیستور D880 دارای حداکثر جریان کلکتور 3 آمپر است.
کنترل موتور در دو جهت :
برای کنترل موتور در هر دو جهت ،مدار تمام پل میتواند مورد استفاده قرار بگیرد.عملکرد این مدار بسیار ساده بوده و در زیر توضیح داده میشود :
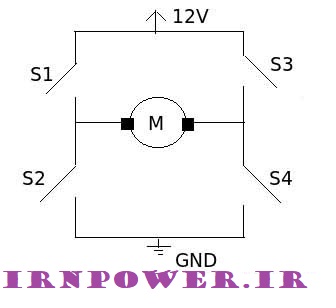
وضعیت های سوئیچ زنی در این مدار به شکل زیر هستند .و میتوان از دو ترانزیستور npn و دو ترانزیستور pnp این عمل را انجام داد.
| سوئیچ های بسته | سوئیچ های باز | ولتاژ اعمالی بر موتور | حرکت |
| هیچ کدام | S1,S2,S3,S4 | 0 | بدون حرکت |
| S1,S4 | S2,S3 | +12v | ساعتگرد |
| S2,S3 | S1,S4 | -12V | پادساعتگرد |
| S1,S3 | S2,S4 | 0V | ترمزی |
جدول وضعیت سوئیچ زنی
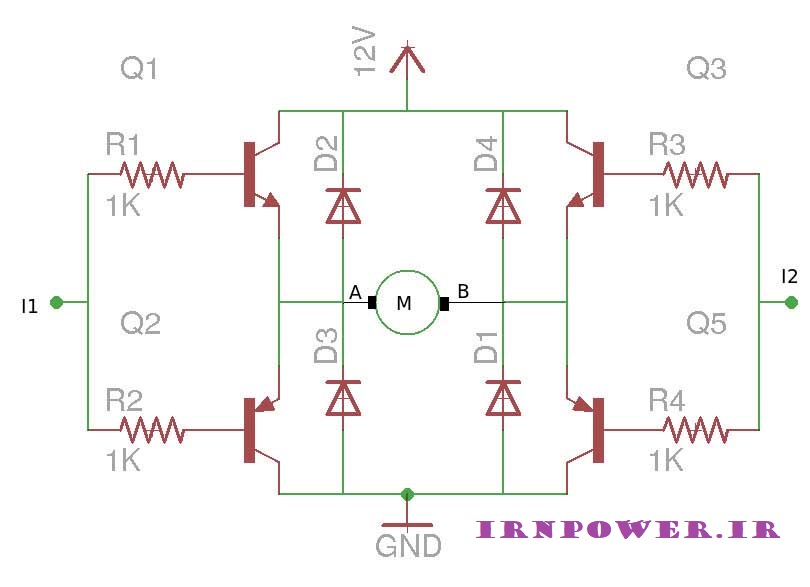
| I1 | I2 | A | B | حرکت |
| وضعیت 0 | وضعیت 0 | 0 | 0 | متوقف |
| وضعیت 1 | وضعیت 0 | 12V | 0 | ساعتگرد |
| وضعیت 0 | وضعیت 1 | 0 | 12V | پادساعتگرد |
| وضعیت 1 | وضعیت 1 | 12V | 12V | ترمزی |
جدول مرتبط با شکل قبل
وضعیت 1 به معنی اعمال 5 ولت و وضعیت 0 به معنی GND است.ترانزیستورهای قدرت NPN و PNP خود را به نحوی انتخاب کنید که پاسخ گوی جریان موتور در زیر بار باشد.
مدار بالا به درستی در عمل آزمایش شده و به خوبی کار میکند اما آی سی های L298/L293D بر آن ها ترجیح داده میشوند.چرا که در مقایسه با این مدار دارای کانال هایی برای PWM هستند که از طریق آن میتوان سرعت موتور را کنترل کرد. که در بخش دوم این آموزش به بررسی آن ها خواهیم پرداخت.
برای مشاهده بخش دوم آموزش درایو موتور DC اینجا کلیک کنید.
همچنین بخوانید :


{kind=link}
بدون دیدگاه